Marauder Front Sensors
|
|
This page contains details about the Front Sensors on Marauder.
|
|
|
|
Front Sensors
There are three sensors; a pair of Sharp GP2D12 IR (infrared) distance sensors
and a custom IR circuit. The GP2D12's will detect objects in the range of
10 cm to 80 cm. Unfortunately, objects in the range 0 thru 10 cm return
the same values as objects in the 10 to 80 cm range. The close up IR
sensor can detect objects in the 0 to 20 cm range.
Bigger...
|
|
|
|
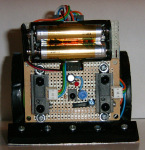
Close IR Sensor Front
This is the circuit board for the close IR circuit. The IR LED (lower right)
is connected to one of the PWM outputs on the PIC. The PWM output is setup
to generate a 38 kHz square wave. The Panasonic 4602 IR demodulator (black
sqaure in the middle) detects the bounced IR signal. This allows Marauder
to detect when another robot is immediately in front of it, and hence ignore
the line sensors. This is particularly useful if the other robot has a
white or shiny scoop and gets under Marauder's scoop. Marauder doesn't want
to detect the opponent's scoop as the white line at the edge of the ring.
Bigger...
|
|
|
|
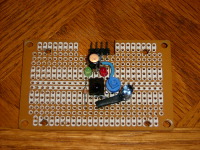
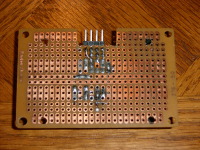
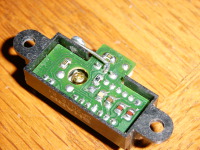
Close IR Sensor Back
This picture shows the back of the circuit board. It really isn't that
difficult to create custom circuits, as long as they aren't too complicated.
Bigger...
|
|
|
|
Front Sensor Schematic
This is the schematic for the front sensor. It's also available in
Eagle format. The green LED is in series with
the IR LED, and this gives positive feedback of when the IR sensor is lit up.
The red LED is connected to the output and gives an indication of when
an opponent is detected.
Bigger...
|
|
|
|
Grounding wire for GP2D12
This shows one of the GP2D12 sensors. The case is made of a conductive
plastic and I read somewhere that grounding the case was a useful thing to
do. So I drilled and tapped a #2 screw in the side and connected a wire
from ground to the screw.
Bigger...
|
|
|
|
Grounding wire for GP2D12
From the back you can see the wire from ground (the middle wire from the
connector) to the screw. When I first did this, I didn't make the screw
short enough, and it shorted against the trace closest to the screw. You
can see a little shiny spot where this happened. Needless to say, the sensor
didn't work when this happened.
Bigger...
|
|
Home
- Line Maze 2006
- Marauder
|