|
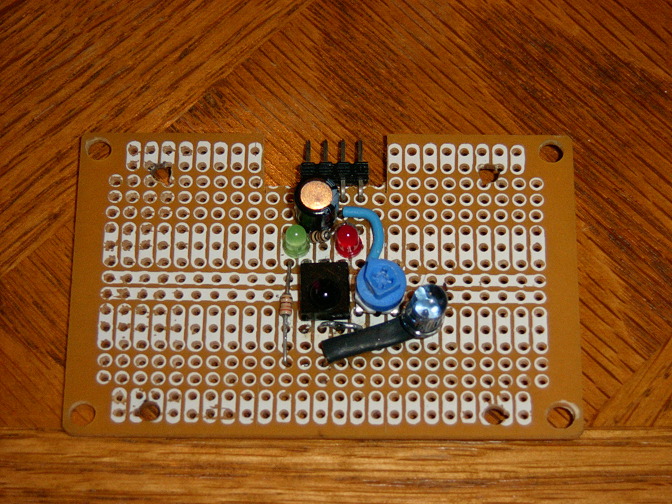
This is the circuit board for the close IR circuit. The IR LED (lower right)
is connected to one of the PWM outputs on the PIC. The PWM output is setup
to generate a 38 kHz square wave. The Panasonic 4602 IR demodulator (black
sqaure in the middle) detects the bounced IR signal. This allows Marauder
to detect when another robot is immediately in front of it, and hence ignore
the line sensors. This is particularly useful if the other robot has a
white or shiny scoop and gets under Marauder's scoop. Marauder doesn't want
to detect the opponent's scoop as the white line at the edge of the ring.
Bigger...
|
|
{kind=link}