Holding Jig |
Next |
|
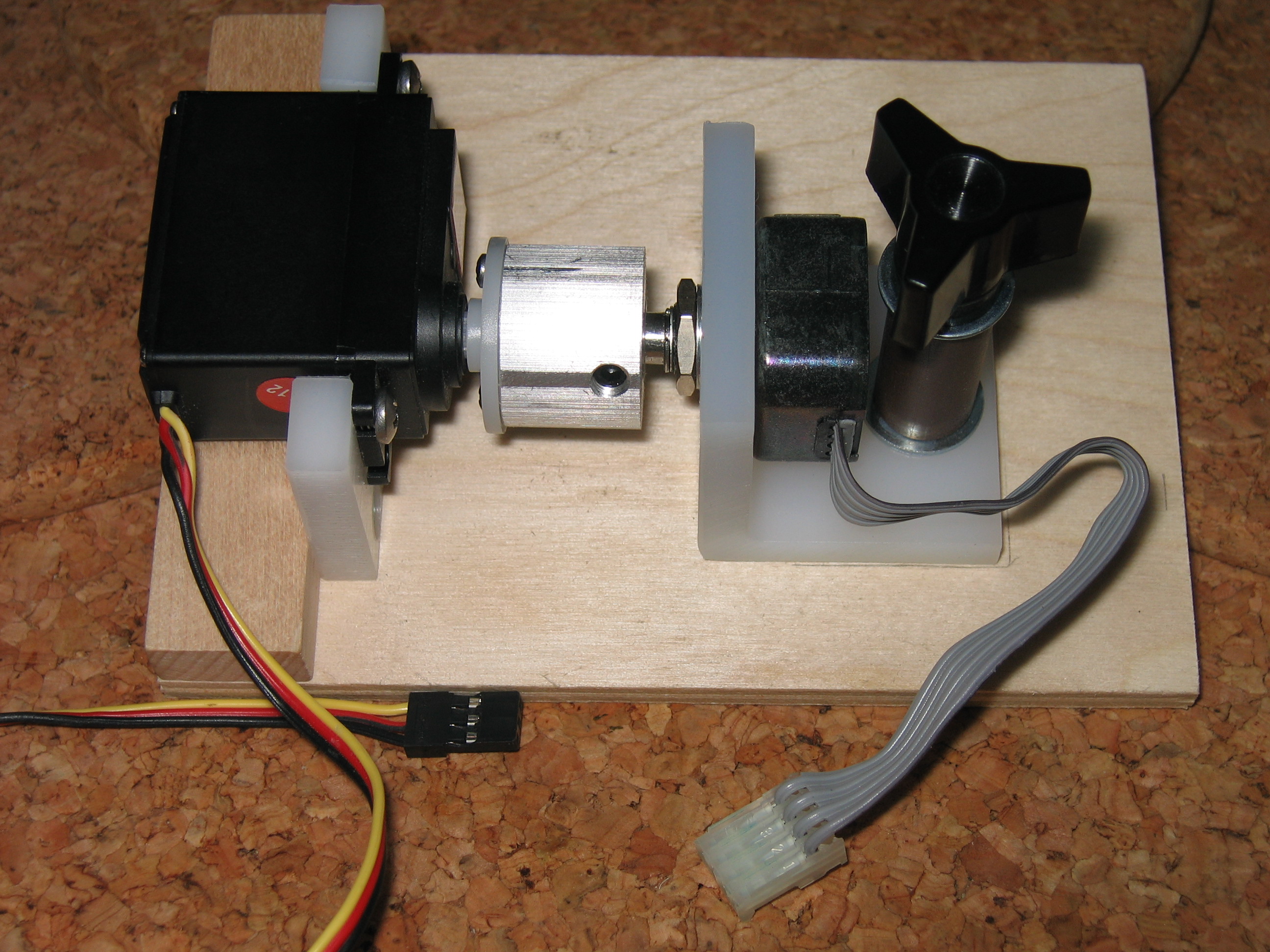
| I whipped up a jig using some scraps of wood and plastic that I had. I used one of the servo horns that came with the servo, and my highly sophisticated coupler consists of a scrap of 1" round aluminum that was drilled to accept the shaft of the encoder, with a setscrew to hold things in place. The encoder is a surplus Oak Grigsby one from somewhere. It has 128 pulses per revolution, or 512 edges when you start to do quadrature on it. Smaller... |
| Index | Next |
{kind=link}
Home - Line Maze 2006 - Index